Краткое описание: Занятие посвящено построению конструкции робота и написанию программ «останавливающую прямолинейно движущегося робота, на расстоянии 15 см до стены или препятствия» и
«написать программу для робота, держащего дистанцию в 15 см от препятствия» для него. Конспект рассчитан на учащихся начального уровня 3 - 5 класса.
Тип занятия: занятие изучения и первичного закрепления новых знаний.
Форма занятия: комбинированное занятие.
Цели:
Предметная: познакомиться с основными принципами работы датчика ультразвука Lego Mindsorms EV3, изучить работу отдельных блоков (движение, цикл, переключатель) в программе, научиться строить алгоритмы для использования датчика ультразвука.
Методологическая: воспитание информационной культуры учащихся, развитие умения выделять главное в задании, развитие внимательности, памяти, развитие навыков коллективной работы.
Метапредметная: формирование представлений о возможностях конструктора LEGO Mindstorms EV3 в разнообразных сферах деятельности. Методы обучения: объяснительно-иллюстративный, наглядный, частично-поисковый, исследовательский.
Оборудование: компьютер, проектор, наборы Lego Mindstorms EV3, среда программирования, поля для заездов, коробка в качестве препятствия.
Используемые ЦОР: конспект урока, презентация, раздаточные материалы (инструкция по сборке).
План занятия:
-
-
- Организационный момент. (1 мин).
- Актуализация знаний (7 мин).
-
-
- Конструирование (7 мин).
- Теоретическая часть (7 мин).
- Практическая часть (15 мин).
- Подведение итогов урока. Рефлексия (3 мин).
Ход занятия:
1. Организационный момент.
Учитель: Здравствуйте, ребята! Очень хорошо, что сегодня вы пришли в полном составе и. Ведь сегодня мы с вами познакомимся с очень интересным робототехническим конструктором Lego Mindstorms EV3.
Робототехника является мульти дисциплинарной наукой, а это значит, что специалист в этой области знаний должен владеть компьютерными и интеллектуальными технологиями. В современном производстве и промышленности очень востребованы специалисты, имеющие знания и навыки создания программного обеспечения для роботов.
1. Актуализация знаний.
Ребята, а все-таки что же такое робот? (машина, автомат, управляемое устройство….).
Молодцы, вы ответили правильно. Однако, слово «робот», в прямом понимании, означает механический человек.
Как вы думаете, для чего используются роботы? (упростить жизнь человека, выполнять сложную (монотонную, опасную) работу….).
Правильно, хотя современные роботы имеют разнообразный вид, они сохраняют, при этом, свое главное предназначение: заменить труд человека.
А почему, в некоторых случаях, лучше использовать роботов, а не труд людей? (чтобы избежать травм и смертей на опасных производствах и в военной сфере, это выгодно (роботам не нужно платить зарплату), роботы не ошибаются, они быстрее…).
Ребята, а как вы думаете, что нужно для того, чтобы управлять роботом?
Используем «Мозговой штурм». Учитываются любые мысли и идеи
- от банальных до невероятных. Предлагаю вам выйти к доске и записать их.
Глядя на доску, ответьте, чем мы будем сегодня заниматься?
(программировать робота, учиться управлять, создавать робота…).
Человечество становится все более мобильным, поэтому роль транспортной отрасли возрастает – мы чаще перемещаемся на малые и большие расстояния и предъявляем все больше требований к скорости, безопасности, комфорту и экономичности этих передвижений.
Кто догадается, к чему я веду? (во всем мире создается автоматизированный транспорт, умный транспорт, беспилотный транспорт). Правильно, мы будем создавать беспилотного робота.
А чем должен быть оснащен беспилотник, для своей работы? Для ответа на этот вопрос, воспользуйтесь, пожалуйста Интернетом.
(«Беспилотный транспорт - механические средства для перевозки пассажиров или грузов, передвигающееся без экипажа на борту при помощи специальной системы автономного управления. Такой транспорт может передвигаться по специально выделенным полосам по заранее устанавливаемым маршрутам или участвовать в общем движении, поскольку он оснащен комплексом датчиков, камер, радаров и принимающим решения бортовым компьютером»).
Движение робота по линии - самый популярный эксперимент начинающего робототехника.
Главная цель разработчика робота, а вы в перспективе ими станете, является создание такого механизма, который был бы автономным и мог выполнять поставленные задачи без человека. То есть система должна анализировать ситуацию и самостоятельно принимать решения.
Для того, чтобы наш робот мог двигаясь по полю, объезжать препятствия нам необходим по крайней мере один датчик ультразвука, который смог бы распознавать препятствия.
Главное назначение ультразвукового датчика, это определение расстояния до предметов, находящихся перед ним. Для этого датчик посылает звуковую волну высокой частоты (ультразвук), ловит обратную волну, отраженную от объекта и, замерив время на возвращение ультразвукового импульса, с высокой точностью рассчитывает расстояние до предмета.
Ультразвуковой датчик может выдавать измеренное расстояние в сантиметрах или в дюймах. Диапазон измерений датчика в сантиметрах равен от 0 до 255 см, в дюймах - от 0 до 100 дюймов. Датчик не может обнаруживать предметы на расстоянии менее 3 см (1,5 дюймов). Так же он не достаточно устойчиво измеряет расстояние до мягких, тканевых и малообъемных объектов. Кроме режимов измерения расстояния в сантиметрах и дюймах датчик имеет специальный режим "Присутствие/слушать". В этом режиме датчик не излучает ультразвуковые импульсы, но способен обнаруживать импульсы другого ультразвукового датчика [4].
1. Конструирование
Прежде чем говорить о программировании, мы должны собрать простейших роботов-беспилотников. Действуя по аналогии с инструкцией, крепим датчик ультразвука в передней части робота. Подключим его кабелем к порту "3" модуля EV3 и приступим к разбору практических примеров использования ультразвукового датчика.
На данном этапе урока учитель раздает обучающимся инструкции по сборке робота-пятиминутки и помогает, в случае необходимости, отдельным группам в ходе сборки модели.
Теоретическая часть
Задача №1: написать программу, останавливающую прямолинейно движущегося робота, на расстоянии 15 см до стены или препятствия.
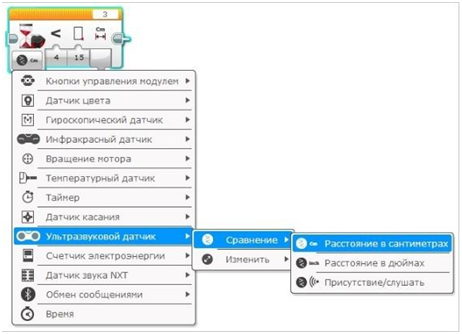
Для решения задачи воспользуемся уже знакомым нам программным блоком "Ожидание" Оранжевой палитры, переключив его в Режим: "Ультразвуковой датчик" - "Сравнение" - "Расстояние в сантиметрах"
Рис. 19. Фрагмент урока
Решение:
- Начать прямолинейное движение вперед (настраиваем блок “рулевое управление” на движение вперёд с заданной скоростью)
- Блок “ожидание”, пока значение ультразвукового датчика не станет меньше 15 см.
- Блок “стоп”
Рис. 20. Фрагмент программы
1. Практическая часть
А сейчас попробуйте сами написать программу для движения робота до достижения заданного расстояния до препятствия.
Вы можете загрузить её в робота и проверить на поле. Напоминаю, что тут мы можем использовать как блок “независимое управление”, так и “рулевое управление”.
Вижу, что все прекрасно справились с этим простейшим заданием.
Сейчас попробуем усложнить задачу.
Теоретическая часть
Задача №2: написать программу для робота, держащего дистанцию в 15 см от препятствия.
Решение:
Поведение робота будет следующим:
- при значении показания ультразвукового датчика больше 15 см робот будет двигаться вперед, стараясь приблизиться к препятствию;
- при значении показания ультразвукового датчика меньше 15 см робот будет двигаться назад, стараясь удалиться от препятствия.
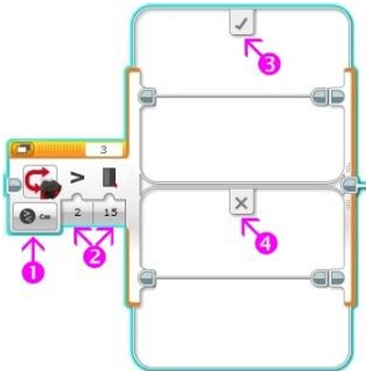
Мы уже знаем, что за организацию выбора выполняемых блоков в зависимости от условия отвечает программный блок "Переключатель" Оранжевой палитры. Установим для блока "Переключатель" режим "Ультразвуковой датчик" - "Сравнение" - "Расстояние в сантиметрах" Параметр "Тип сравнения" блока "Переключатель" установим в значение "Больше"=2, а "Пороговое значение" определим равным 15 Такие настройки программного блока "Переключатель" приведут к следующему поведению программы: При показаниях ультразвукового датчика больше 15 см будут выполняться программные блоки, помещенные в верхний контейнер в противном случае будут выполняться программные блоки, помещенные в нижний контейнер
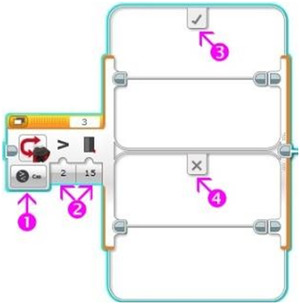
Рис. 21. Фрагмент программы
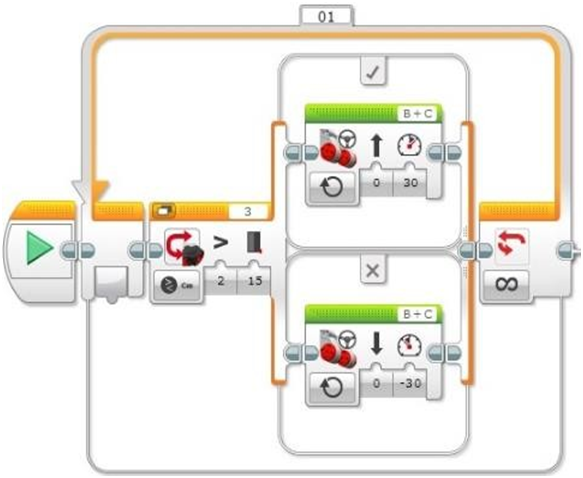
Поместим в эти контейнеры программные блоки, включающие движение вперед и назад. Для того чтобы программный блок "Переключатель" выполнялся многократно, поместим его внутрь программного блока "Цикл" Оранжевой палитры
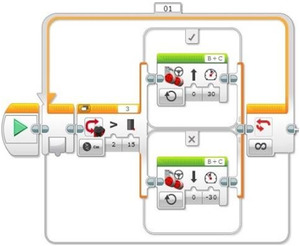 Рис. 22. Фрагмент программы
Рис. 22. Фрагмент программы
Загрузите получившуюся программу в робота и запустите ее на выполнение. Если перед роботом отсутствует препятствие, то он поедет вперед. Поднесите руку близко к ультразвуковому датчику, попробуйте отводить - приближать руку. Как ведет себя робот?
Подведение итогов урока. Рефлексия.
Итак, ребята, давайте подведем итоги нашей работы.
- Какие виды алгоритмов мы с вами сегодня использовали при составлении программ?
- Какие блоки программы необходимы для обнаружения препятствия?
- Что в работе вызвало у вас затруднения?
- Где в дальнейшем могут быть использованы знания, полученные вами сегодня на занятии?
Спасибо вам за продуктивную работу! До свидания.
|